
b) Utilisation du gecko dans la robotique
Mais existe-t-il d'autres innovations technologiques au niveau du gecko?
En effet, d’autres innovations dans le domaine technologique et nano-technologique ont également été réalisées en se basant sur le modèle du gecko. Les ingénieurs en robotique se sont penchés sur son adhérence exceptionnelle, comme vu précédemment, pour créer des robots de plus en plus performants !
Difficile de les différencier... :
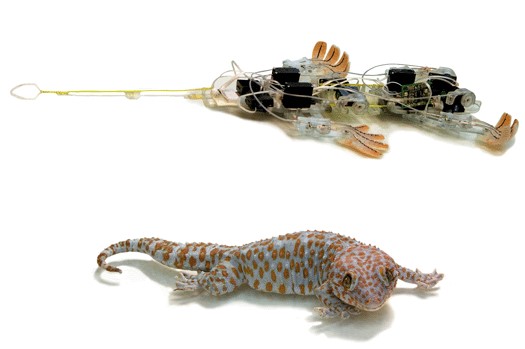
Le tout premier robot-gecko créé fut le StickyBot, conçu pour l'escalade et possédant pratiquement les mêmes capacités adhésives que le gecko. Celui-ci fut créé à l'Université de Stanford par Sagbae Kim à l'époque où il étudiait encore. L'adhésion du robot est permise par la présence de disques adhésifs dotés de poils en caoutchouc de silicone, étant tout de même plus épais que les sétules des geckos, mais aussi sa limite car celui-ci ne peut alors se déplacer que sur des surfaces aussi lisses que le verre.
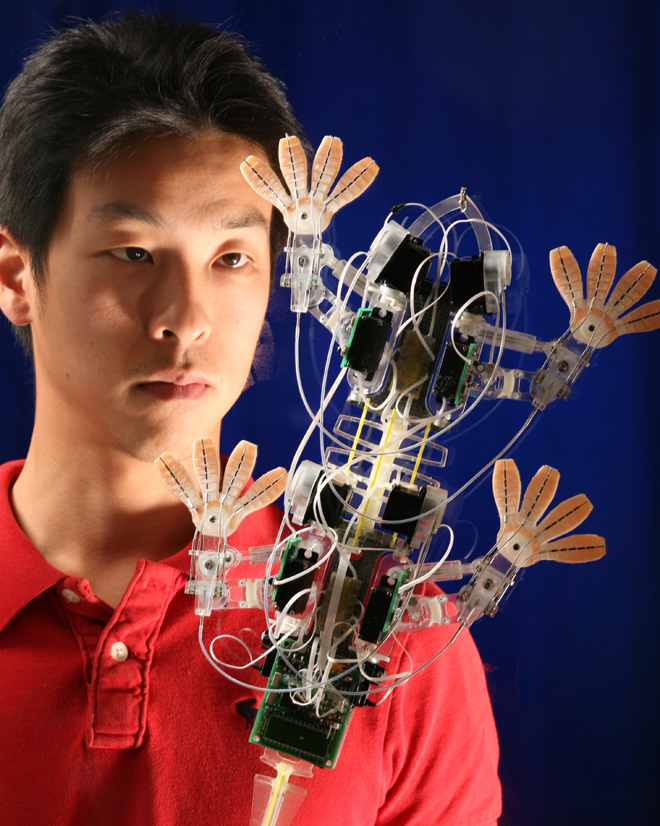
Sangbae Kim avec son StickyBot :
D'autres robots-geckos ont été créés dans un but bien précis, aider l'Homme dans certaines tâches dangereuses ou difficiles, tel que pour le sauvetage, la réparation et l'inspection de fusées dans l'espace ou encore le plus souvent créés pour la surveillance et l'inspection d'endroits dangereux tel que les réacteurs nucléaires.
L'un de ces robots est le Waalbot, créé à l'université de Carnegie-Mellon à Pittsburgh par l'une des équipes de l'université.
Les membres de l'équipe en question (de gauche à droite : Metin Sitti, Michael P Murphy et Ozgur Unver) :



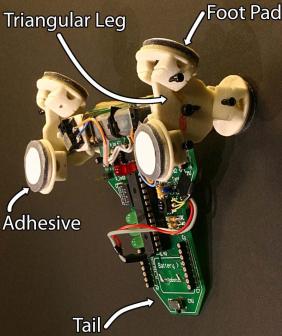
Ce robot a été créé à partir de la nanotechnologie et tient son nom des célèbres forces de Van der Waals présentées précédemment et qui explique l'adhérence de l'animal dont il s'inspire. Le Waalbot est constitué de 2 "pattes" triangulaires elles-mêmes disposant chacune de 3 "pieds-tampons" adhésifs situés sur l'anneau extérieur de chaque patte. Ceux-ci sont constitués de fibres élastomères qui permettent au robot une excellente reproduction des forces de Van der Waals et donc de se déplacer sans problème aux murs comme au plafond. Avec l'aide d'une seule patte triangulaire, celui-ci à la capacité de changer de direction en pivotant. Enfin, ces pattes particulières lui permettent également de changer de surface sans problème tout en se déplaçant.
Le fameux Waalbot :
Waalbot II en action ! (vidéo mise en ligne par Metin Sitti lui-même sur son robot) :
L'une des limites du robot qu'il ne possède pas de système autonettoyant sur ses pattes adhésives comme le gecko, celui-ci ayant ainsi du mal à se mouvoir après avoir accumulé de la poussière dessus.
Cependant, l'objectif de cette équipe est à présent de fabriquer des fibres de 4 micromètres de diamètre, soit 2 fois plus fines que les fibres actuelles et qui permettra au robot de se déplacer sur des surfaces rugueuses.
Un autre exemple très intéressant est celui du robot-gecko développé par la ESA avec l'université canadienne Simon Fraser qu'ils ont nommé Abigaille. Celui-ci a été créé dans le but de réparations spatiales sur des fusées ou encore sur des satellites tel que réparer des panneaux solaires ou opérer des opérations de checkup grâce à sa petite taille. Celui-ci est équipé de 6 pattes (normales, contrairement au Waalbot) utilisant un revêtement en microfibres qui lui permettent d'imiter l'adhérence du gecko, les capacités adhésives de cet animal étant idéales dans les conditions de vide et les températures de l’espace. Abigaille possède pratiquement les mêmes caractéristiques que le Waalbot (tel que changer de surfaces sans perte d'adhérence) et de nombreux tests ont déjà prouvées son efficacité.
Abigaile III en action (vidéo mise en ligne par CoconutScienceLab) :
Le gecko est donc omniprésent dans la robotique et peut servir à de très nombreuses applications, dont également avec des collecteurs de débris spatiaux, permettant ainsi à l’Homme de progresser et de faciliter certaines de ses tâches.
Vous souhaitez plus d'exemples et si possible plus parlants ? Appuyez sur A.....non pas celui de votre clavier mais celui-là : A